The user will configure the wireless transceiver node to wake-up every X minutes and take readings. Typically this is every 15 minutes.
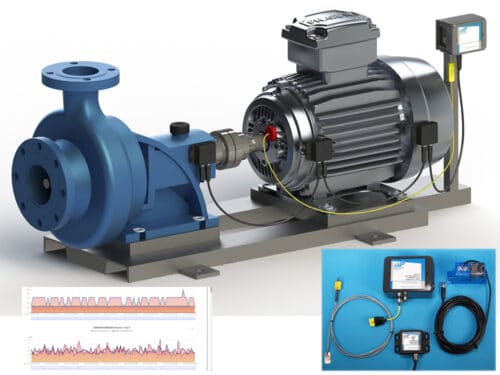
The vibration sensor is activated and it runs for 3 seconds – taking readings on the X, Y, and Z axis at 5000 Hz on each axis.
The 45,000 vibration data points are then edge processed into metrics that are proven to indicate problematic changes in machine vibration. The X and Y axis are combined to report a “radial” or “rotating” direction. The Z axis is used to report the axial vibration that is parallel with the motor shaft.
The data is then edge processed into metrics for radial and axial vibration.
- RMS acceleration weights the higher frequencies – friction, rubbing, grinding
- RMS velocity weights the lower frequencies – misalignment or fatigue, unbalance, belt issue, poor mounting
- Peak acceleration will detect serious impact forces such as bearing defects and chipped gear teeth
- Crest Factor – Instability usually from impulses
One, or all, of these vibration metrics will typically increase from its baseline level to 2X normal baseline levels when failure happens. Alerts are typically set at 1.5X baseline levels.